Parts
Bellows, flange, and inner liner
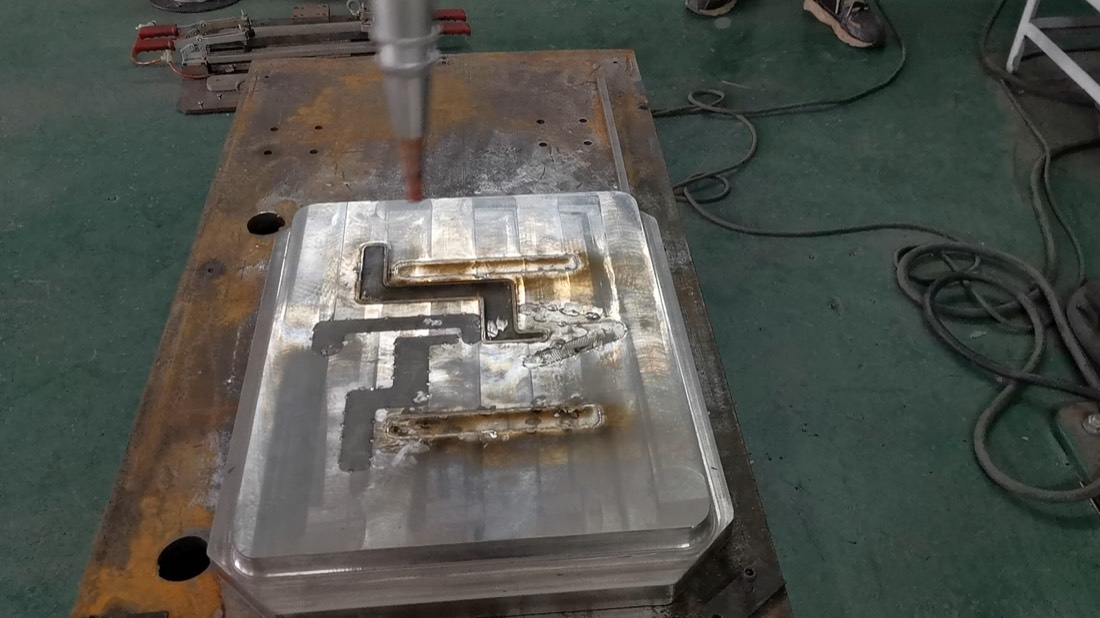
Manual loading into a fixture, with robot welding after first-piece teaching and process confirmation.
A robotic laser welding system concept for bellows-to-flange and bellows-to-inner-liner welding, combining wire-fed laser welding, autogenous laser welding, fixture positioning, and gas shielding.
Manual loading into a fixture, with robot welding after first-piece teaching and process confirmation.
Inconel 625 to 409NImod uses wire-fed laser welding; Inconel 625 to 304 stainless uses autogenous laser welding.
The fixture design routes shielding gas around the weld and into sealed cavities to reduce oxidation risk.
| Module | Reference Configuration | Role in the Case |
|---|---|---|
| Robot | ARC12-1400 class six-axis robot | Path control around circular and spatial welds. |
| Laser | 2kW fiber laser reference package | Low heat input welding for high-value alloy assemblies. |
| Workholding | Dual-axis positioner, chuck, and custom welding fixture | Controls weld access, posture, and repeatability. |
| Process assist | Wire feeder, shielding gas routing, and enclosed guarding | Supports fit-up tolerance, oxidation control, and operator safety. |
Each new case should capture part geometry, material pairing, welding method, fixture logic, and acceptance requirement.